

noos::cloud::path_planning Struct Reference
calculate a path between two points given More...
#include <navigation.hpp>
Public Types | |
| using | callback = std::function< void(data_type)> |
 Public Types inherited from noos::cloud::cloud_base< std::deque< noos::object::point2d< float > > > Public Types inherited from noos::cloud::cloud_base< std::deque< noos::object::point2d< float > > > | |
| using | data_type = std::deque< noos::object::point2d< float > > |
Public Member Functions | |
| path_planning (const noos::object::pose2d< float > start, const noos::object::pose2d< float > goal, const float robot_radius, const float resolution, const std::string map_name) | |
| Public Member Functions inherited from noos::cloud::http_request | |
| http_request (const std::string uri) | |
| construct a cloud HTTP request (multipart/form-data) | |
| http_request (const std::string uri, bool keep_alive) | |
| construct a cloud HTTP request (multipart/form-data) with keep_alive param | |
| http_request (const http_request &arg) | |
| copy constructor | |
| void | fill_buffer (boost::asio::streambuf &buffer, noos::cloud::platform info) |
| fill the socket streambuf with the request header and post data More... | |
| template<typename... Args> | |
| void | add_content (Args...args) |
| add multiple content to the post with HTTP Protocol | |
| void | close () |
| close this request properly More... | |
| std::string | to_string (noos::cloud::platform info) const |
| translate noos::cloud::platform parameters into a string with HTTP Protocol format | |
| std::string | to_post () const |
| translate post data into a string with HTTP Protocol format | |
| bool | operator== (const http_request &rhs) const |
| compare if two http_request are equal | |
| void | make_multipart_form () |
| make this a multipart-form, by creating the correct header fields, boundaries and multipart entries | |
| Public Member Functions inherited from noos::cloud::cloud_base< std::deque< noos::object::point2d< float > > > | |
| cloud_base (bool single_call) | |
| Constructor. More... | |
| bool | is_single_callable () const |
| std::string | make_http_uri (std::string uri) const |
Static Public Attributes | |
| static const std::string | uri |
Detailed Description
calculate a path between two points given
- Version
- 0.8.0
- Date
- 17.10.2017
- Note
- data type passed back is
std::deque<noos::object::point2d<float>>
Inheritance diagram for noos::cloud::path_planning:

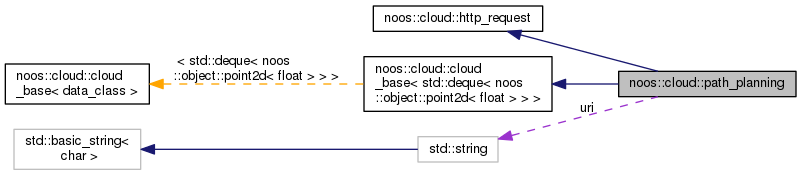
Collaboration diagram for noos::cloud::path_planning:
Constructor & Destructor Documentation
| noos::cloud::path_planning::path_planning | ( | const noos::object::pose2d< float > | start, |
| const noos::object::pose2d< float > | goal, | ||
| const float | robot_radius, | ||
| const float | resolution, | ||
| const std::string | map_name | ||
| ) |
- Parameters
-
start is the start point of the robot goal is the goal pose where you need to go robot_radius is the radius in meters of the robot resolution is the resolution that the map has map_name is the name of the map (without extension)
The documentation for this struct was generated from the following file:
- noos/cloud/navigation.hpp