

noos::object::laser Struct Reference
describes a laser scan data More...
#include <laser.hpp>
Public Member Functions | |
| laser ()=default | |
| Constructor. | |
| json::object_t | to_json () const |
| bool | operator== (const noos::object::laser &rhs) const |
| Equality operator. | |
Public Attributes | |
| float | aperture = 0.0 |
| Aperture of the laser in radians. | |
| uint64_t | timestamp = 0 |
| Time. | |
| float | max_range = 0.0 |
| Maximum distance of laser measurements in meters. | |
| float | std_error = 0.0 |
| Statistical error of laser. | |
| bool | right_to_left = true |
| The direction in which the laser rotates. | |
| std::vector< float > | ranges = {0.0} |
| Measurements of distance. | |
| std::vector< int > | intensities = {0} |
| Intensity values of the scan. | |
| noos::object::pose< float > | pose3d |
| Sensor pose. | |
Detailed Description
describes a laser scan data
- Version
- 0.7.3
- Date
- 27 June 2017
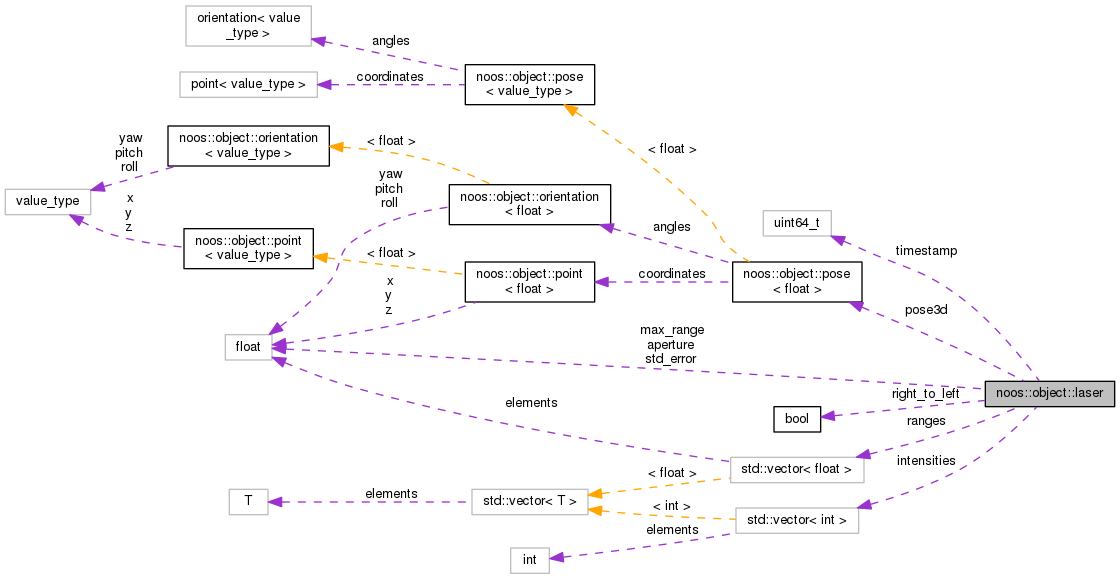
Collaboration diagram for noos::object::laser:
Member Function Documentation
| json::object_t noos::object::laser::to_json | ( | ) | const |
- Returns
- json object
The documentation for this struct was generated from the following file:
- noos/objects/laser.hpp